UBC SailBot, the innovative robotic sailing team made up of computer science and engineering students, is getting ready for a potentially groundbreaking voyage. This summer, their 5.5 metre long sailboat will launch off the coast of Newfoundland in an attempt to become the first fully autonomous, unmanned vessel to cross the Atlantic. If all goes according to plan, the vessel will land at Dingle in Ireland approximately three weeks later.
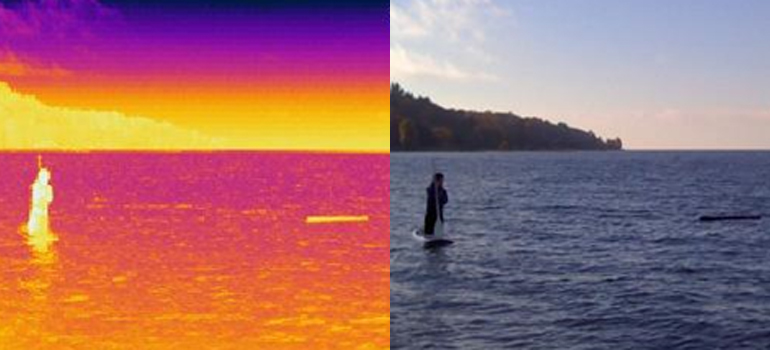
As all previous attempts by other teams at this trans-Atlantic voyage have ended with the robotic sailboats either going missing or capsizing after collisions with debris, icebergs, or other vessels, a key component of a successful voyage will be the detection and avoidance of obstacles. In their quest for a useful method for this, UBC SailBot has opted to experiment with infrared imaging. Dr. Nobo Yonemitsu, Civil senior instructor and infrared expert, has been providing guidance to the team’s obstacle detection group (Paul Cernek, Derek Lun, Benjamin Nie, and Todd Darcie). With the use of another Civil professor’s FLIR infrared camera, the students conducted both daytime and nighttime field work at Jericho Beach to explore the efficacy of an infrared imager when it comes to detecting obstacles in open water. So far, the analysis has been promising, and UBC SailBot’s next aim is to explore IR capabilities in big waves during a trip to Vancouver Island’s West Coast over Reading Week.
The Department of Civil Engineering looks forward to seeing the progress of the team over the next several months as they continue to prepare for their voyage!
Click here for UBC SailBot’s full report on using IR imaging to detect floating obstacles.
Media: Related stories have appeared in CBC News, The Vancouver Sun, Times Colonist and Global News.
Show Your Support: UBC Sailbot is looking for sponsors to assist with this significant undertaking. Click here to learn more and connect with the team.